Signalsidan
Henry's signalsida
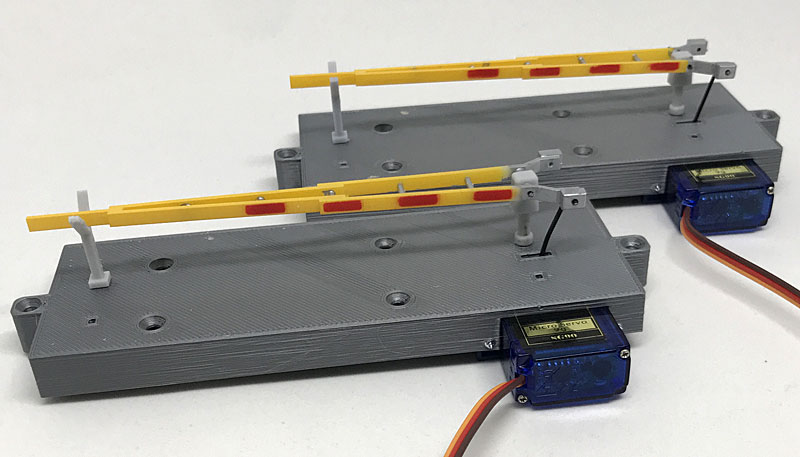
Byggsats plankorsning med bommar
Byggsatsen (10-4410/10-4412) till bommar ger samma resultat som den färdigbyggda varianten (10-4415).
Bommarnas rörelser styrs med en liten servomotor som monteras i basplattan.
Basplattan utgör också fäste för bommotor och bomstöd.
Används kryssmärkessignaler löds dess anslutningar till anslutningskortet som också monteras i basplattan. Signalerna ansluts sedan enkelt till signaldekoder 10-4600 med en tiopolig flatkabel till anslutningskortet.
Bommarnas servomotor styrs med en kontrollenhet(Arduino) och kan fås att fällas då tåget kommer. Detta kan göras genom att ansluta Arduinons ingång till jord.
Man kan i det enklaste fallet ha en strömbrytare som gör detta men en smartare lösning är att använda blockdetektor 10-305 eller ir-detektor 10-503.
Kör man digitalt med ett tågstyrningsprogram kan utgången styras med lämplig relädekoder.
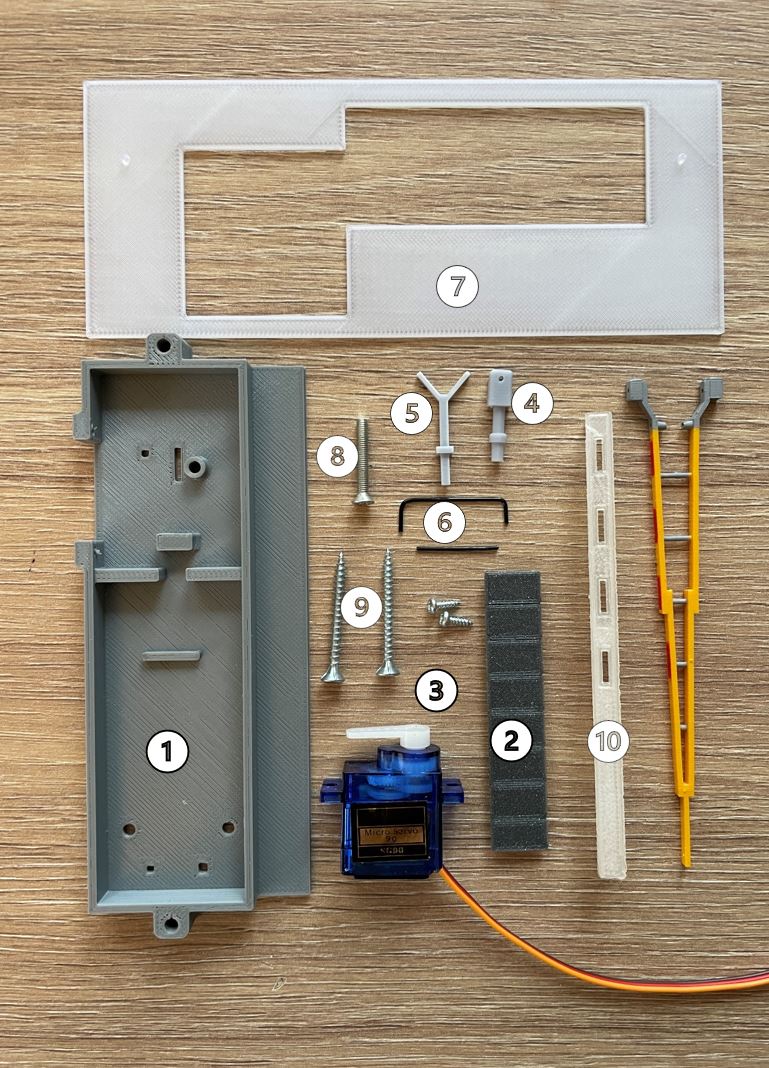
Bilden till höger visar i princip halva byggsatsen. Gångbrädan och uttagsmallen är gemensam för båda bommarna.
Allt är uppbyggt runt basplattan som tjänar som fäste till servomotor, bommotor, bomstöd, justerskruv, signaler och anslutningskort.
Bommarna finns som byggsats i två versioner: 10-4410 med omålad bom och 10-4412 med bommen målad enligt ovan.
Till 10-4410 medföljer en målningsmall som träs över bommen och underlättar målningen av reflexmärkena.
- Basplatta
- Spårbräda
- Servomotor med fästskruvar och vinge
- Bommotor och fäste
- Bomstöd
- Bomlyftare och axel
- Uttagsmall
- Justerskruv
- Fästskruvar basplatta
- Målningsmall
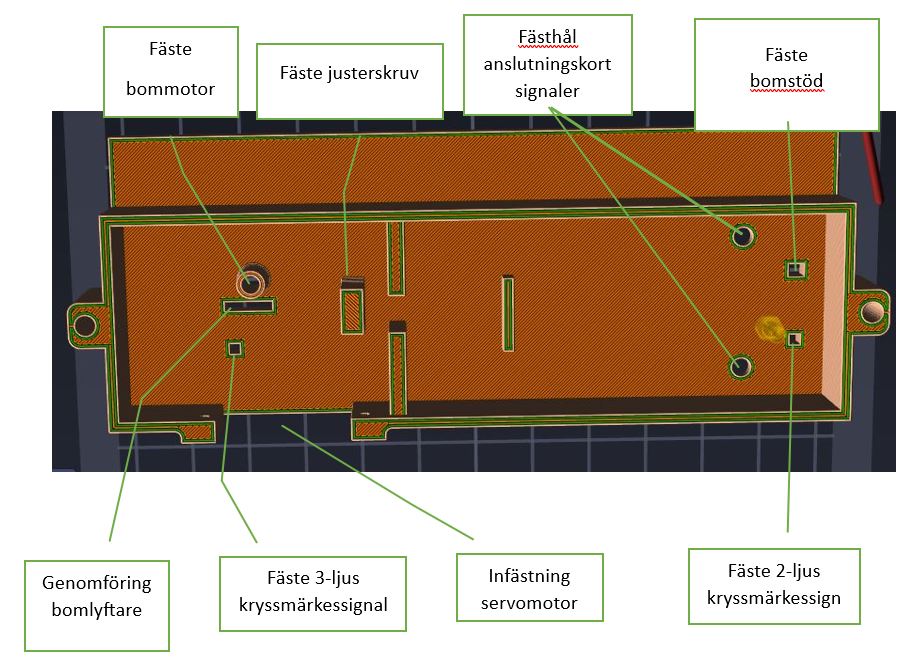
Basplattan utgör själva grunden för allt som skall placeras på vardera sida av plankorsningen.
Den är förberedd för montering av signaler om man väljer att komplettera med detta.
Den har också plats för signalernas anslutningskort 10-901.
I den senaste versionen av basplatta har det tillkommit en justerskruv som skruvas genom en stos. Justerskruvens uppgift är att vara stopp för bommen så att den inte passerar upprätt läge och fäller sig åt fel håll då bommen fälls.
Monteringssteg
Om du monterar bommarna på en plan yta kan uttagsmallen vara till nytta.
Placera basplattorna på var sida av spåret.
Gör en markering med en syl eller liten borr genom monteringshålen.
Uttagmallens piggar passar nu i hålen. Rita hålen på plattan som sedan skall ge plats åt servomotor och anslutningskort till signalerna.
Om du bara monterar bommar utan signaler behöver inte hålet för anslutningskort tas ut.
Notera att de båda basplattorna inte skall monteras mitt emot varandra utan dessa förskjuts så att bommotor och bomstöd placeras mitt emot varndra.
Förbered basplattan genom att montera bommotor och bomstöd. Hålen för bommotor och bomstöd kan behöva filas upp lite för att dessa skall sitta tight.
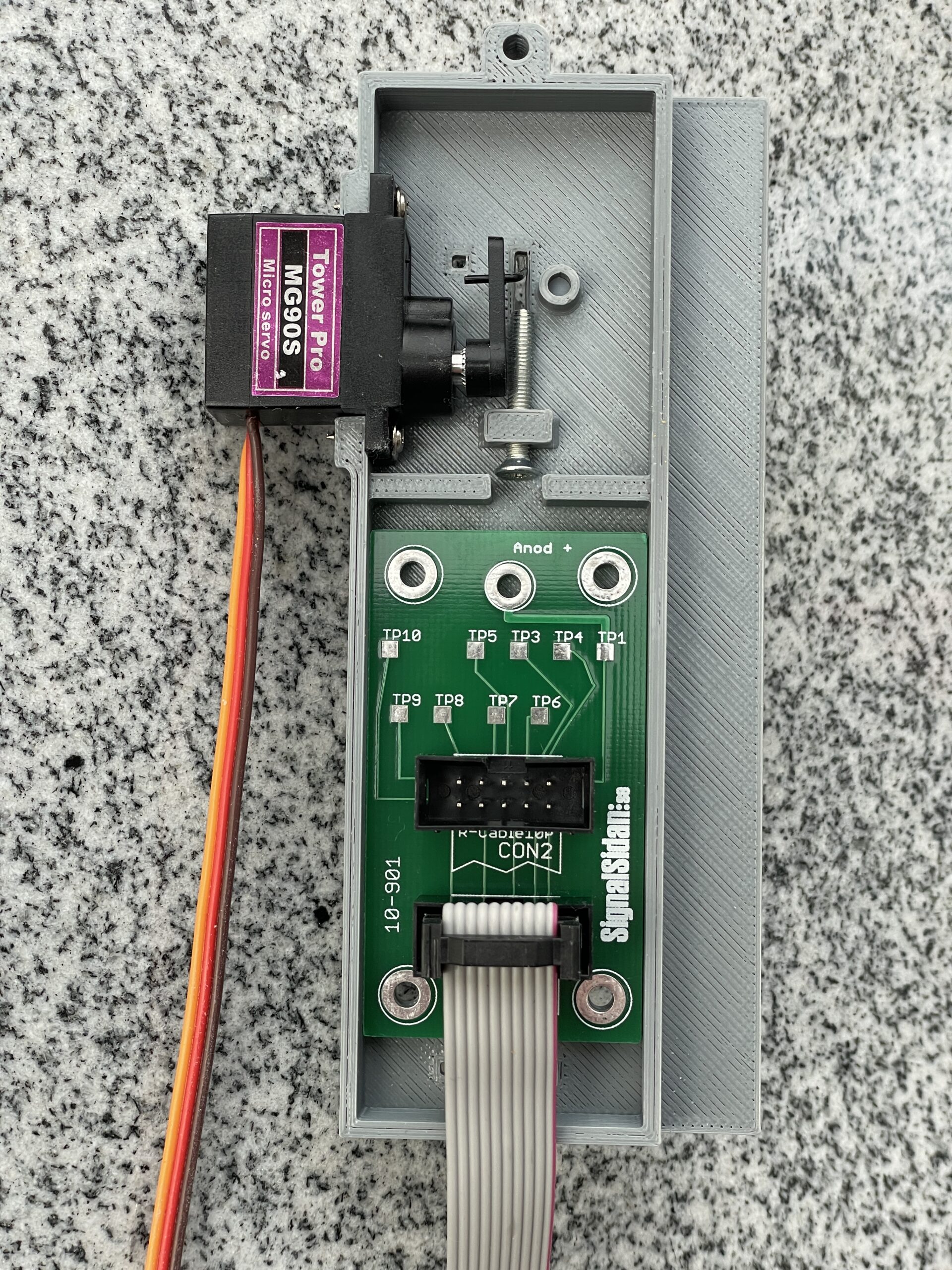
Beroende på om du använder servomotorerna och om du använder vår bomstyrning med vår förprogrammerade Arduino skall svängarmen på servomotorn monteras.
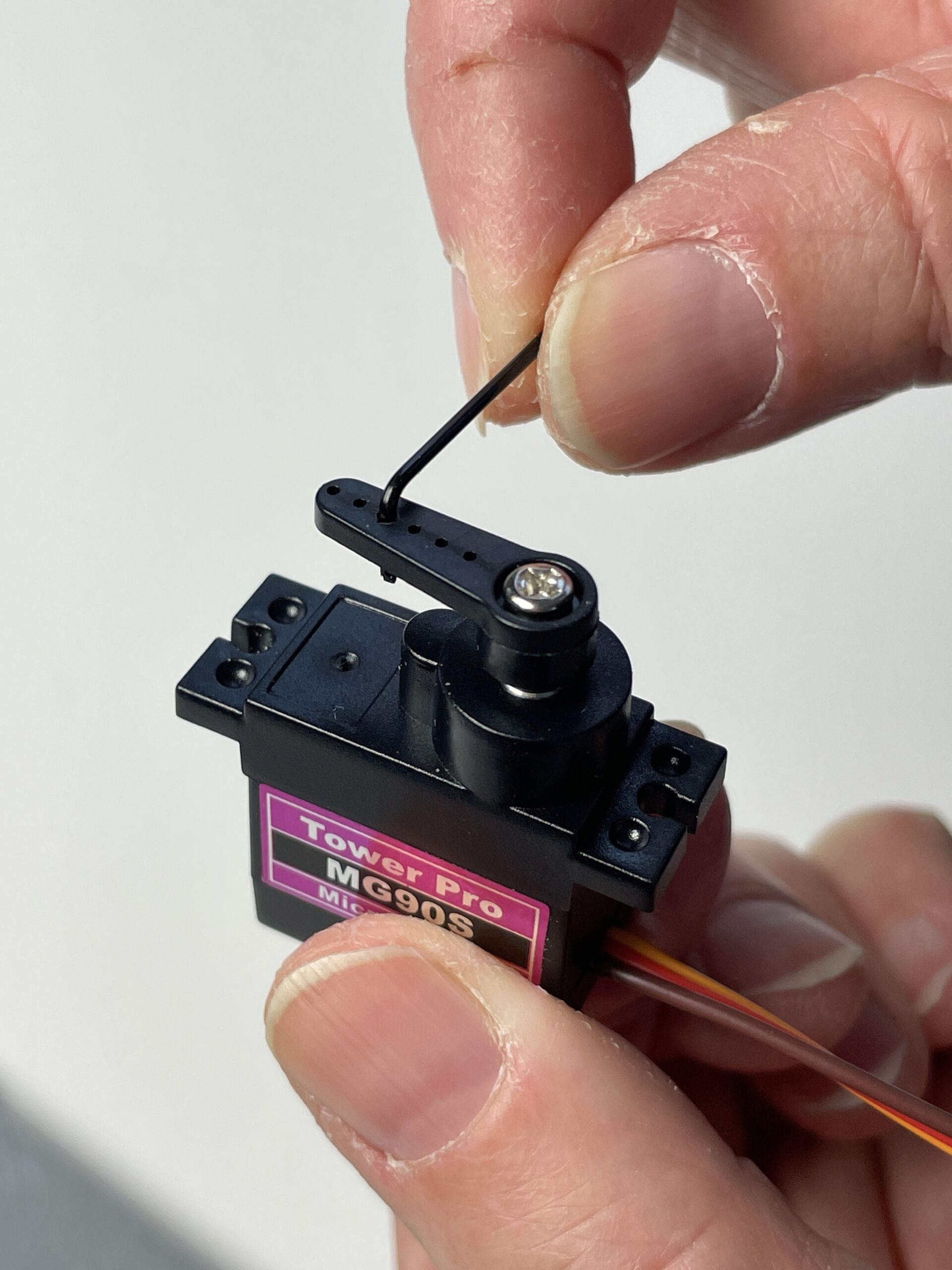
Med vår programvara till Arduinon skall servomoron först anslutas och ställas i ena läget vilket motsvarar att bommarna är fällda. Armen på servomotorn skall då fästas i ett läge som visas på bilden ovan.
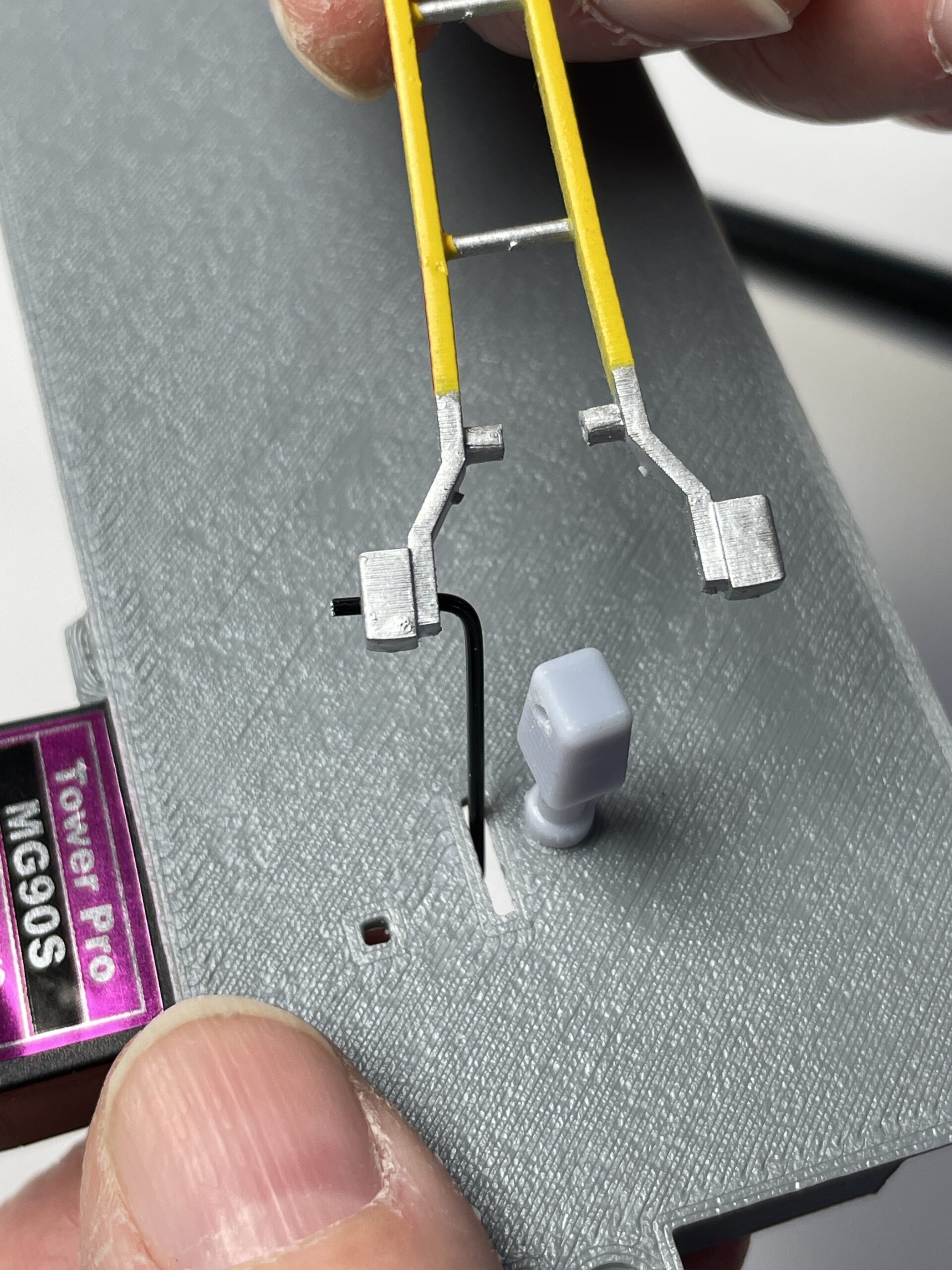
Notera också att bomlyftaren skall monteras i det tredje hålet.
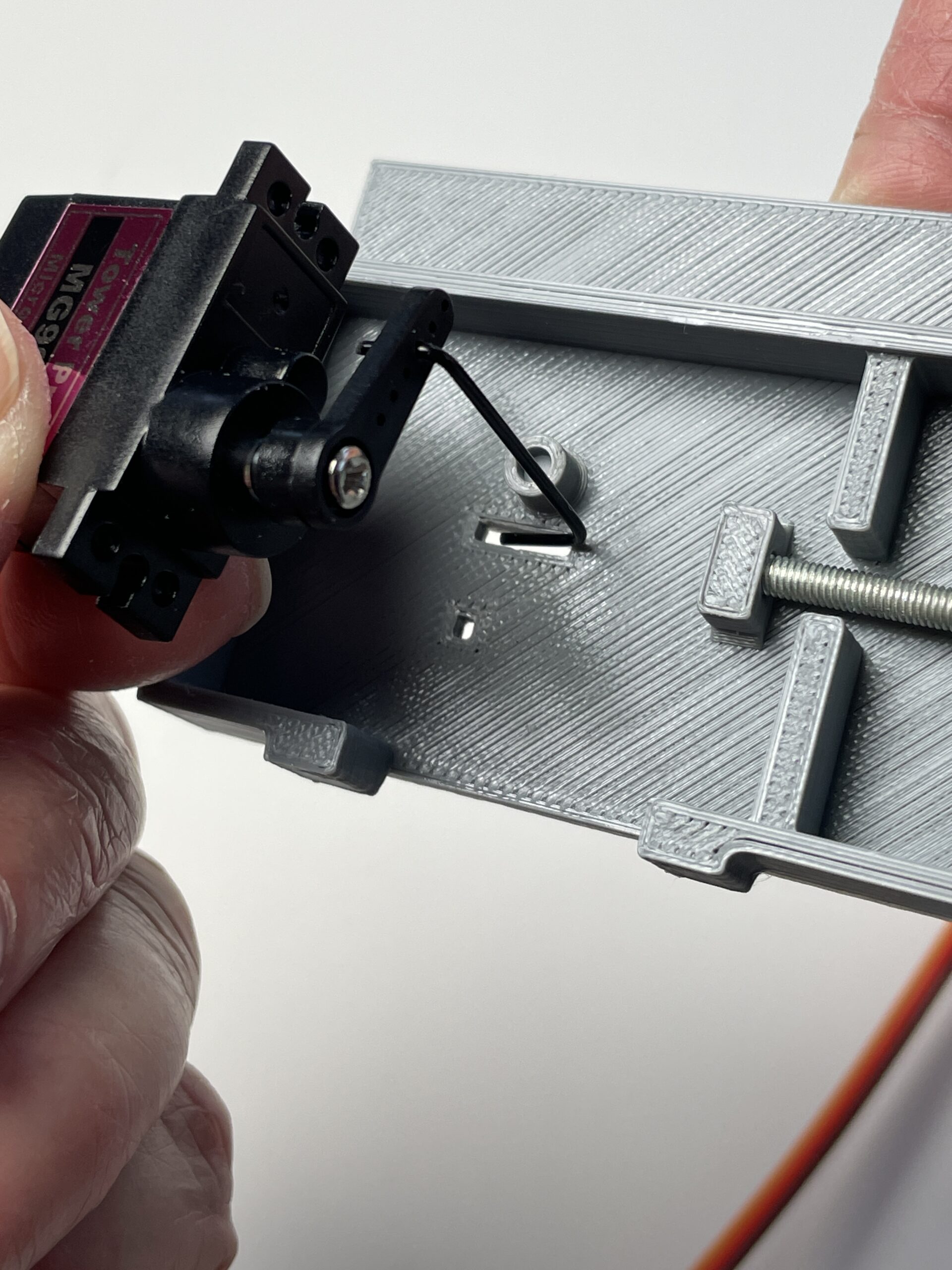
Bomlyftaren träs sedan genom hålet i basplattan.
På bilden ovan har vi också monterat justerskruven som sedan skruvas in till ett läge så att inte bommen i uppfällt läge tippar över åt fel håll.
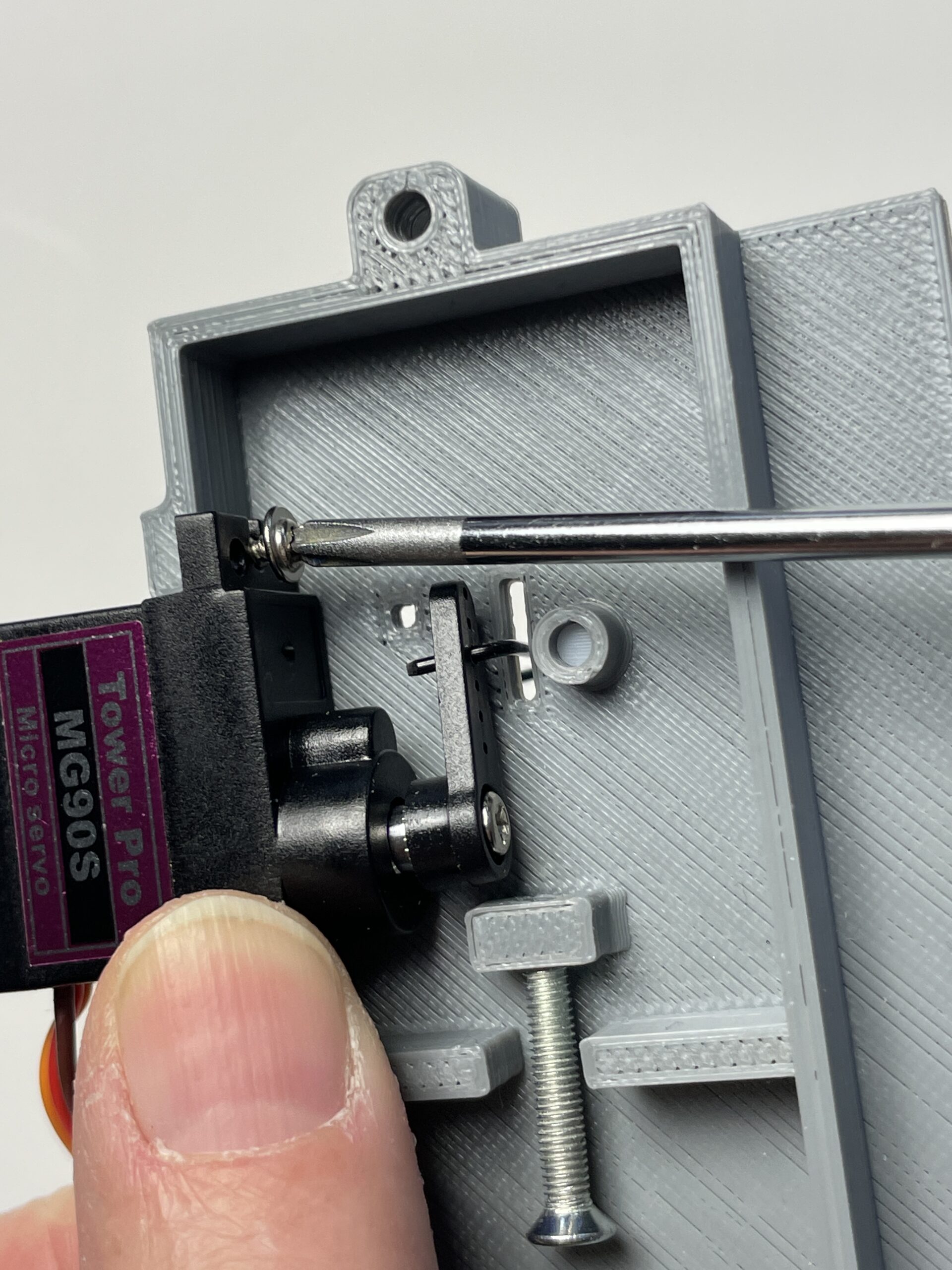
Skruva fast servomotorn med de två skruvarna.
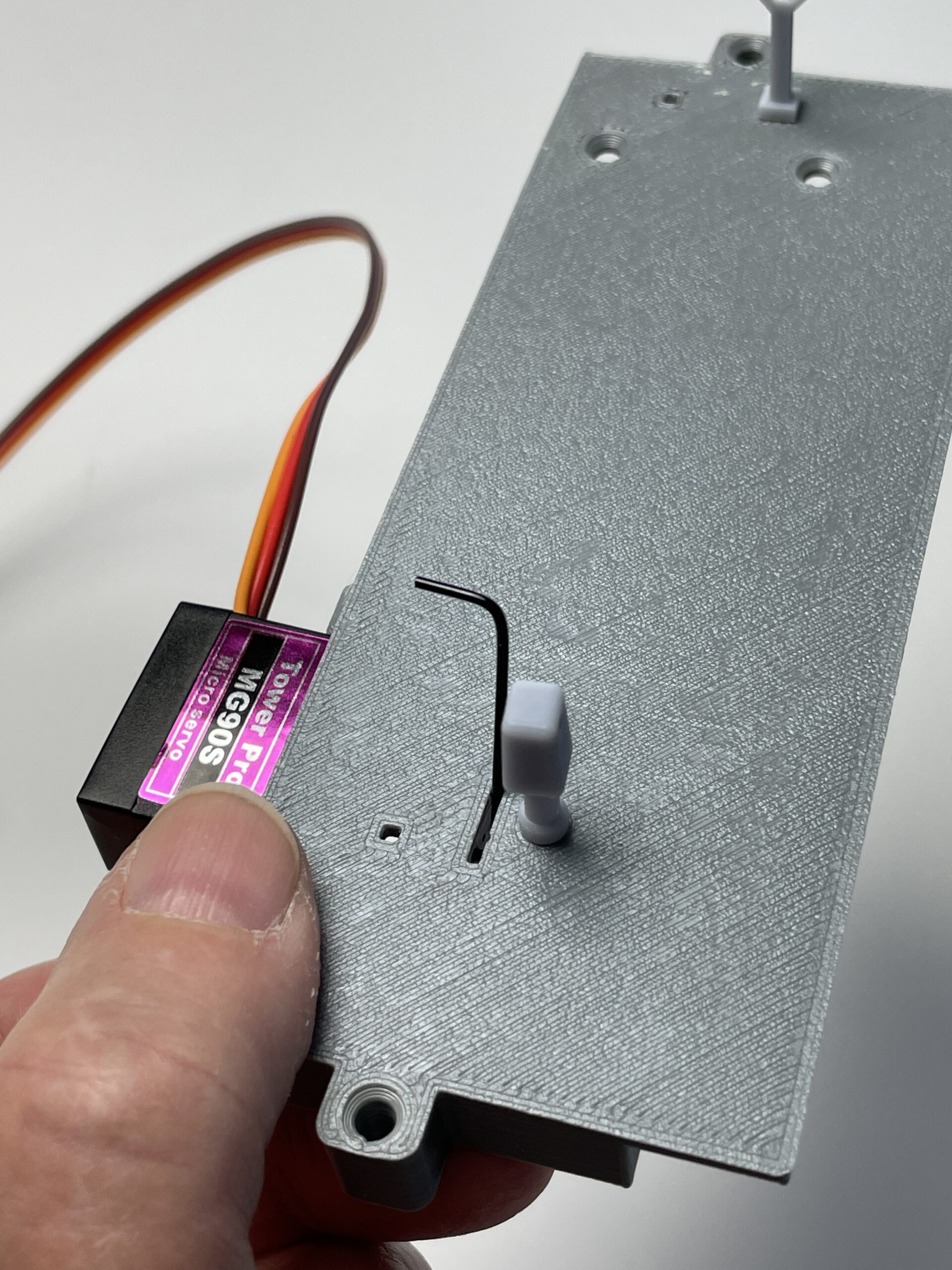
Bomlyftaren sedd från ovansidan.
För in bomlyftaren genom hålet i bommen. Vinkeln på den yttersta delen av bomlyftaren kan komma att vinklas om för att få bommen att passa bra i bomfästet.
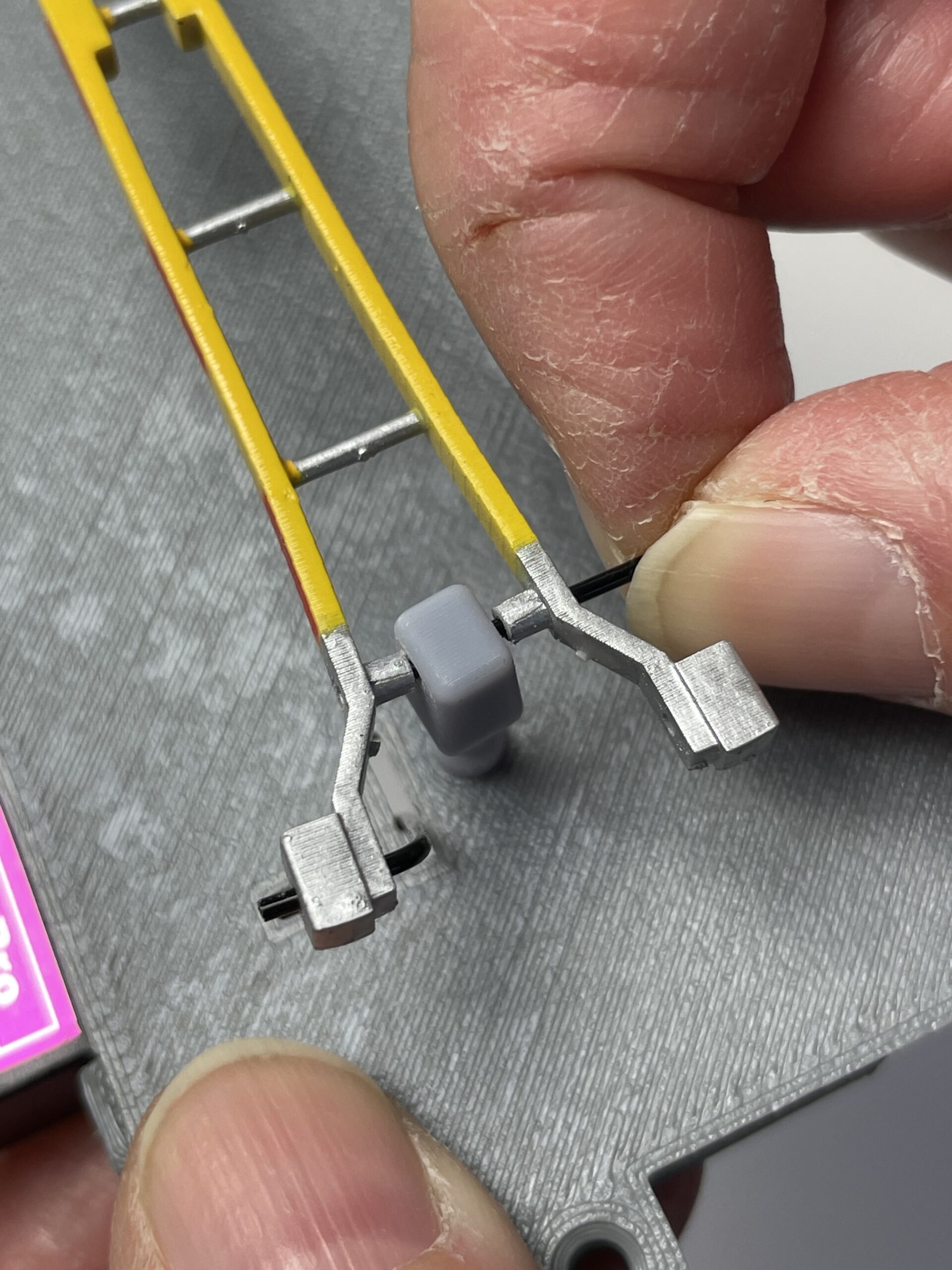
Bomaxeln träs nu genom bom och bommotor.